本研究室で行っている研究について紹介します.
当研究室を志望する学生は こちらのリンク をクリックしてください。
超精密レーザセンサ
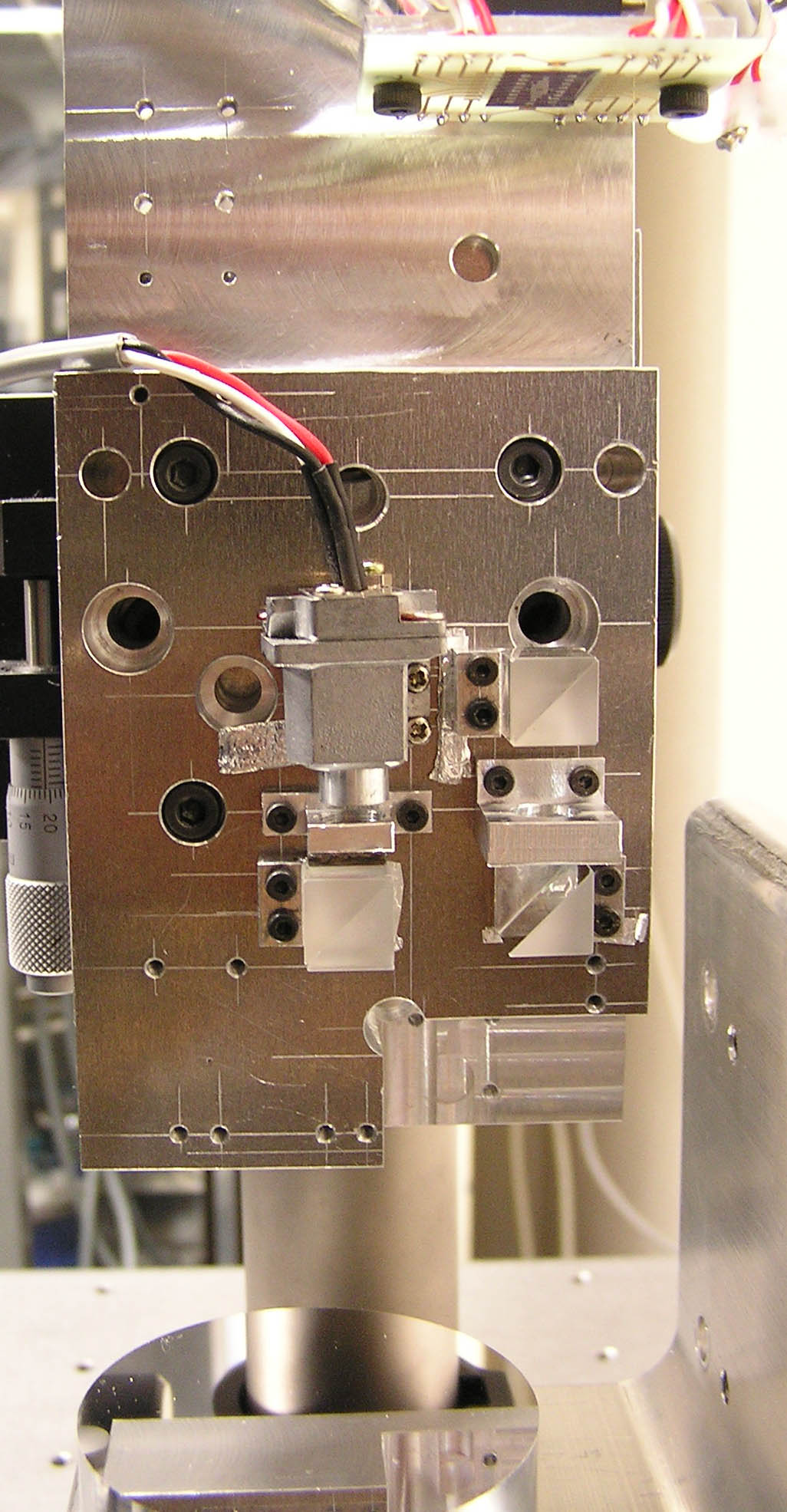
平面ステージ計測用多自由度センサに関する研究
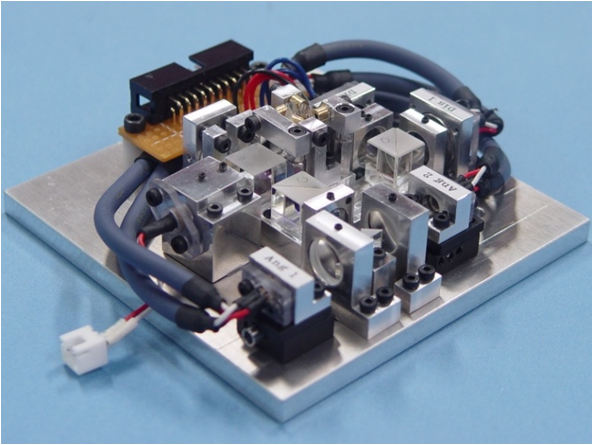
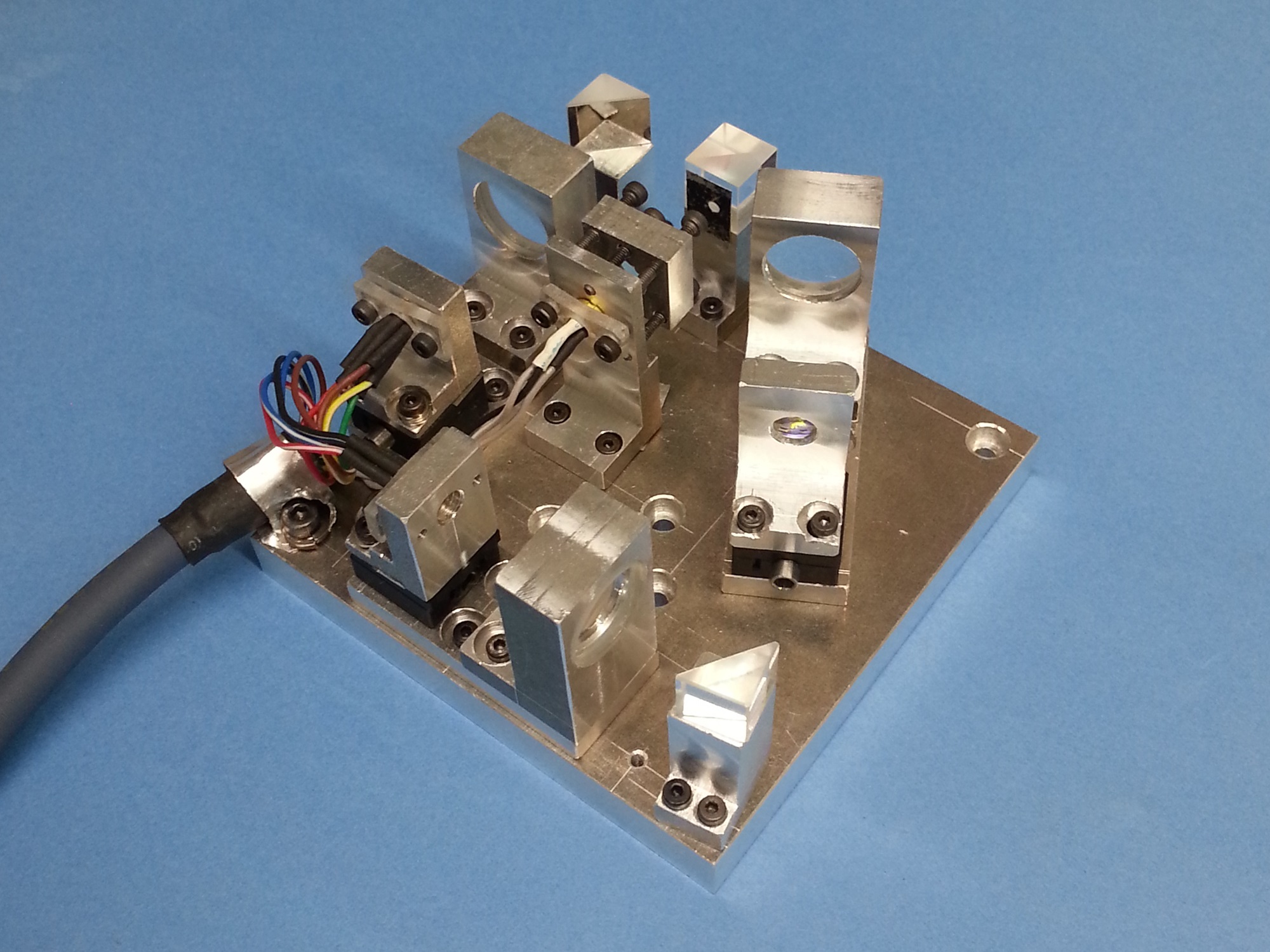
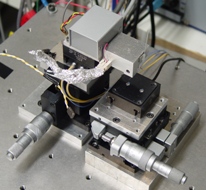
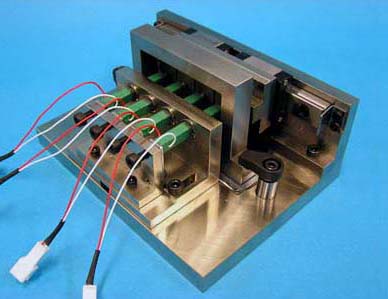
精密測定器・加工機等の基盤産業分野で,平面ステージの位置および姿勢誤差の単独のセンサヘッドによる一括計測が必要である。これらの要求に対応するため,光学式6
自由度センサの開発を行っている.回折光干渉型変位センサとオートコリメーション法を原理とする角度センサを組み合わせることにより,平面ステージの超精密位置決めに利用可能な6自由度センサを実現できることが示せた.試作したプロトタイプは,サイズ95mm(X)×90mm(Y)×28mm(Z),
検出分解能はXYZ各軸5nm,θx θy 0.1 arcsec、θz 0.3 arcsecである.
資料: サーフェスモータ駆動XYθz平面ステージ計測用多自由度センサに関する研究
3軸角度センサに関する研究
超精密加工機や半導体製造装置などの超精密機械にはサブナノメートルオーダの位置決め精度が要求されている.
このような超精密位置決めを実現するためには位置決め装置の運動誤差を高精度に計測するセンサが必要となる.本研究では,位置決め装置の角度誤差を高速・高感度かつ多自由度一括検出可能な角度センサの開発に取り組んでいる.
角度の検出法として回折格子の回折光を利用したレーザオートコリメーション法と4分割フォトダーオード(QPD)による光スポット変位検出を組み合わせた3軸角度センサを試作し,測定対象のXYZ軸周りの角度変化(ロール,ピッチ,ヨー)を0.01秒の高感度で計測する事に成功した.
資料: 3軸角度センサに関する研究
回折光干渉型XYZ3軸サーフェスエンコーダに関する研究
精密測定器・加工機等の基盤産業分野で,nm・もしくはサブnmレベルのXYZ3軸の位置決めが求められている.
これらの要求に対応するため,本研究では2枚の回折格子からの回折光を干渉させることで,XYZ3軸の変位を高い分解能で一括に検出できる光学式変位センサを開発している. 試作したプロトタイプは,XYZ各軸1 nm以下の変位検出分解能を有することを確認した.
資料: 回折光干渉型XYZ3軸サーフェスエンコーダに関する研究
感度安定化角度センサの研究
オートコリメーション原理の角度センサは光スポット径が光源の光周波数ゆらぎに従い変動するため,長時間の角度計測の場合には
センサ感度が安定しないという欠点があった.本研究ではフェムト秒レーザを光源とし,その周波数スペクトルである光コムの性質を利用してセンサ感度を安定化させることを目的とした角度センサの開発を行っている.
資料: 感度安定化角度センサの研究
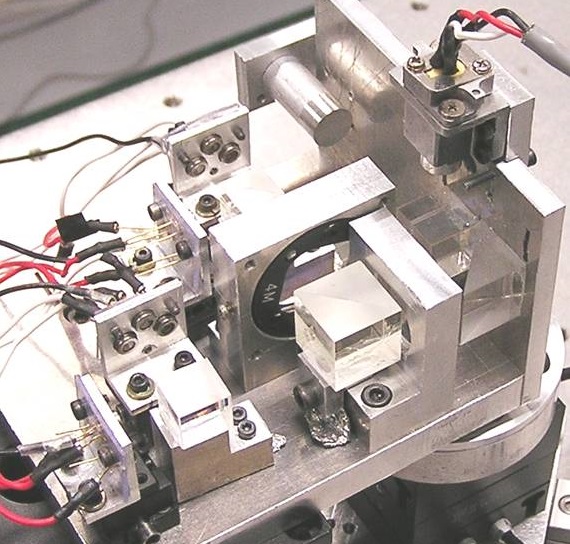
X-Y-θx-θy-θz 5自由度検出型サーフェスエンコーダ

サーフェスエンコーダは、3本の光学式2次元角度センサで角度格子を読み取ることで,
5自由度XYθxθyθzの検出が可能な平面エンコーダであり, 2本のマルチビームを有する角度センサ(プローブ1, プローブ2)出力と, 1本の太いシングルビームプローブ(プローブ3)出力で5自由度の変位を同時に高速に検出できる.
実験の結果,XY分解能は100 nm,θxθy分解能は0.01秒, θxθz分解能は0.3秒であった.
資料: 多自由度位置・姿勢検出用サーフェスエンコーダの開発
X-Y-θx-θy-θz 5自由度検出型サーフェスエンコーダ
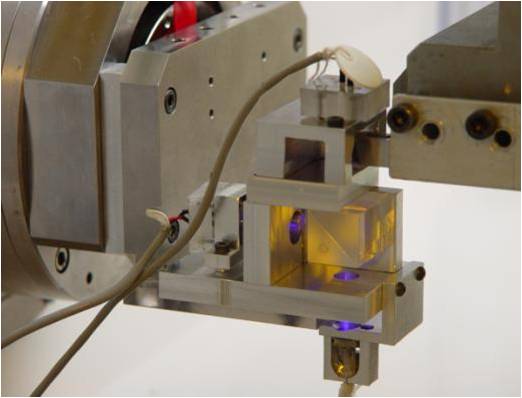
光干渉型サーフェスエンコーダ
角度格子の短ピッチ化に伴う回折,干渉の影響を考慮するために,光学系の原理を原点から考えなおし,
回折理論に基づく光学モデルを新しく構築した.その過程で,4分割PD上に生じる回折像の挙動を利用することで XYθxθyθzの5自由度の運動を検出する原理を考案した. 実験の結果,XY変位はf・3.8mmの範囲で70nmの分解能を有すことを,
θxθyは ±30arcsecの範囲で0.3arcsecの分解能を有すことを確認した.θzはPD素子の故障により 検出できなかったが,提案する手法と同種のスポットの回転を利用したセンサを試作した結果, ±2000arcsecの範囲で12arcsecの分解能を有すことを確認した.
資料: 光干渉型サーフェスエンコーダ
XYZ3軸ナノ変位センサに関する研究
精密測定器・加工機等の基盤産業分野で,nm・もしくはサブnmレベルのXYZ3軸の位置決めが求められている.
これらの要求に対応するため,本研究では2枚の回折格子からの回折光を干渉させることで, XYZ3軸の変位を高い分解能で一括に検出できる光学式変位センサを開発している. 試作したプロトタイプは,XYZ各軸5nmの変位検出分解能を有することを確認した.
高感度マイクロ角度センサの研究

オートコリメーション原理の角度センサはセンサ感度が対物レンズ長さに比例するため, 高感度角度検出の場合には
センサが大型化してしまうという欠点があった. 本研究では半導体レーザ(LD)を光源とし,対物レンズ焦点面上に分割型のPDを配置する光学系において センサ感度がLDビーム径とLD出力波長にのみ依存する事を明らかにし, またレンズ焦点面上でのスポットサイズと
感度の関係をシミュレーションすることで,高感度,高速応答, 2次元角度検出が可能なマイクロ角度センサの開発を行った.センササイズは26mm×22mm×12mm,重量0.09kg, 測定範囲は±30秒,またセンサの分解能は0.05秒(5kHz周波数帯域時)である.
資料: PDアレイを用いた角度センサの研究
高感度マイクロ角度センサの研究
超精密形状計測加工システム
ダイヤモンド切削工具の機上ナノ計測に関する研究
超精密切削加工では,耐摩耗性の優れたダイヤモンドを材料とした工具が使用される.
被加工物に数十ナノメートルオーダの形状精度で加工された刃先形状を転写することで加工を行うため,
刃先形状測定には高い精度が要求されている.本研究では,ダイヤモンド切削工具の機上計測のために
小型のAFMを開発した.その上光学式プロブを用いて,測定用AFM-tipと工具の位置あわせ方法及び輪郭測定方法を提案する.
資料: ダイヤモンド切削工具の機上ナノ計測に関する研究
大型ロール旋盤の精密測定に関する研究

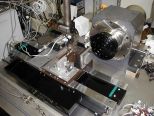
大型ロール金型を用いた大面積微細形状加工への需要が増加し,金型を加工する大型ロール旋盤の加工機スライドに要求される運動精度が向上している.
本研究では,大型ロール旋盤の駆動スライドの真直度誤差及び平行度誤差を2本の静電容量型変位センサを用いることで測定するシステム及びアルゴリズムを提案している.
資料: 大型ロール旋盤の精密測定に関する研究
三次元微細形状測定のための走査型静電気力顕微鏡(SEFM)に関する研究
本研究では三次元微細形状測定のための非接触静電気力顕微鏡を提案し,その開発を行っている.水晶振動子に接着した探針と試料表面との間に働く
静電気力を測定しながら試料表面を非接触で倣い走査する.50 nm以上の探針・試料間距離を維持する完全非接触走査で,静電気力に影響を与える
試料表面電荷分布等のパラメータをキャンセルしつつ探針・試料間の絶対距離を算出する.距離測定の原理を形状測定に適用して回折格子の三次元形状像を
取得し,提案する測定原理の有効性を確認した.
資料: 三次元微細形状測定のための走査型静電気力顕微鏡(SEFM)に関する研究
接触型熱検知センサによる平滑面欠陥検出に関する研究

本研究では平滑面上に存在する微小欠陥検出手法として,微小欠陥とセンサプローブ先端の接触により発生する微小摩擦熱を,
マイクロサイズの熱検知センサで検知しウェハ表面上の微小突起を検出する,新しい原理の欠陥検出法を提案している.
提案手法実現の為に,作製したセンサプロトタイプが目標とする分解能を有しているかを実験的に評価している.
資料: 接触型熱検知センサによる平滑面欠陥検出に関する研究
工具刃先形状の精密計測に関する研究

μmオーダの刃先幅で構成された鋭角の刃先形状を損傷を与えることなく加工機上で計測するシステムの開発を行っている.
市販のレーザ変位センサに微小先端径を有するスタイラスと低ヤング率,低ばね定数を有するカンチレバーを設置することで
加工機上における急峻な形状の測定を可能とし,測定範囲100 μmにおいて測定力0.1 mN以下を実現する.
試作機では工具刃先サンプル計測において繰り返し精度±0.3 μmを達成した.
資料: 工具刃先形状の精密計測に関する研究
シェアフォース検出を用いた微小球付きナノピペットプローブに関する研究
マイクロ構造物の形状及び寸法の精密計測が求められているが,アスペクト比(縦:横)の高い構造物は従来の測定機では測定するのが難しい.
本研究ではこういった高アスペクト比形状を有するマイクロ構造物を低測定力,かつナノメートルオーダの分解能で計測するため,
微小球付きスタイラスとシェアフォース検出を利用した新たな測定機の開発を行っている.
資料: シェアフォース検出を用いた微小球付きナノピペットプローブに関する研究
非球面形状のナノ計測に関する研究
非球面形状のナノ計測を実現するため,様々な形状に対して適応性が高く, 対環境性に優れる接触式の点走査法をとりあげる.
この方法を用いる際, 走査基準となるスライドの運動誤差が問題となるため, ソフトウェアデータムの手法を適応しその誤差を取り除く.
また,非球面のような傾斜角の大きく変化する形状を測定する際,無視することのできない誤差要因となる接触式プローブの
先端球形状誤差の測定法を提案する.
資料: 非球面形状のナノ計測に関する研究
マイクロ非球面レンズのナノ計測に関する研究
スロットダイの精密スリット幅測定
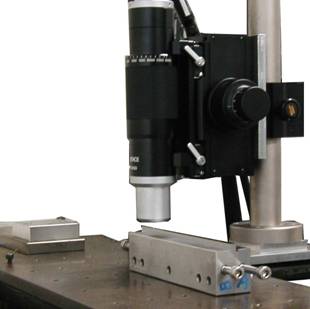
スロットダイ(塗布工具)の性能向上のために,先端スリット幅の高精度な測定が必要である.
本研究では高速で外乱振動や運動誤差に強いことが要求される加工機上での測定法を開発した.
CCDカメラを走査して,非接触かつ連続的にスリット幅を求める.光学系に傾斜がつくことによる輝度変化の影響,
ワーク表面の反射率による輝度変化の影響を除去し,エッジ位置検出によってスリット幅を計算する.提案した測定法により,
1000点/1mを30秒で測定可能,200 nmの繰り返し性を達成できた.
資料: スロットダイの精密スリット幅測定
高アスペクト比微細形状測定用AFMプローブユニットの研究

超精密加工技術の発達によりナノメートルオーダの精度での加工がなされ,いわゆる高アスペクト比微細形状をもつ部品が増えている.
本研究では高アスペクト比微細形状を数十nm の精度で計測するために,AFM を適用することを考え,
小型かつ高精度なAFMプローブユニットを開発した.で測定可能,200 nmの繰り返し性を達成できた.
資料: 高アスペクト比微細形状測定用AFMプローブユニットの研究
超精密三次元微細形状の高精度・大面積創成
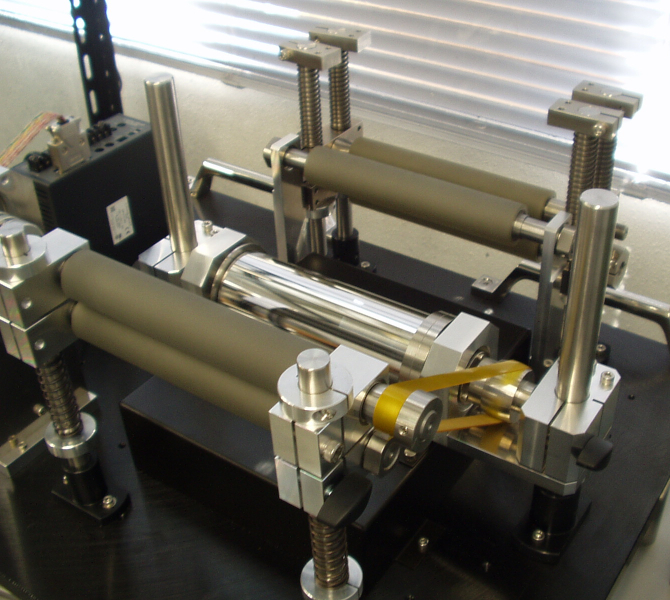
計測基準面として用いられる三次元微細形状には,加工の高精度化,大面積化,短時間化といった高生産性への要求がある.
本研究では,金属円筒表面の三次元微細形状を 生産効率の高い形状転写加工によって樹脂フィルム上に創成することを目的としている.
これまでにホットエンボス加工とUV転写加工による三次元微細形状の転写が行われている.
資料: ホットエンボス加工による超精密3次元微細形状のナノインプリンティングに関する研究
超精密3次元微細形状の高精度・大面積創成に関する研究
大面積三次元微細形状の精密創成

三次元微細形状は計測基準面,マイクロレンズアレイなど様々な分野において用いられている.
本研究では,高速工具サーボと超精密旋盤を用いたダイヤモンド切削によりワーク端面および円筒側面に
三次元微細形状を創成することを目的とする.これまでに直径150mmの円盤端面および直径55mm長さ150mmの
円筒側面全面に渡り三次元微細形状の創成が達成されている.
資料: 円筒面への微細パターンの創成
大面積三次元微細形状の精密創成
マイクロナノモーション/マイクロロボットシステム
マイクロXYステージの開発
光学素子やマイクロ部品などを限られた領域内で長ストロークかつ高精度に位置決めする手段として,
本研究では長ストロークマイクロXYステージの開発を行っている.このステージではSIDMの駆動子に
磁石を用いて小型化と駆動の安定化を実現し,またリソグラフィ技術により高感度なCr-N薄膜歪ゲージを
板ばね案内機構と一体化し,駆動の高精度化を行っている.
資料: マイクロXYステージの開発
小型高速工具サーボの研究開発

光超精密旋盤と高速工具サーボ機構を用いたシングルポイントダイヤモンドバイトによる超精密切削技術により
3次元微細パターンを創成することが行われている. 高速工具サーボ機構の小型化を行うことで,
動特性・熱特性の向上が期待される. そこで,小型の圧電素子・静電容量型変位計を用いて高速工具サーボを構成し,
小型化を行った. また,圧電素子・ドライバーの関係を最適化することで駆動の高速化・高精度化を行った.
資料: 小型高速工具サーボの研究開発
マイクロパターンを利用したステップモータの研究
3次元微細パターンを有する2面の噛み合せを利用した,新しい原理のステップ駆動型のリニアモータを開発している.
噛み合わさる2面には断面が台形形状である周期的な溝を切削加工し,一方を圧電素子により面垂直方向に往復運動させて,
パターンを噛合わせながらステップ的な移動を実現する.現在,パターン周期が56μmのものでは,
1ステップの移動量が約14μm,推進力3.4N,移動速度最大11.7mm/secを達成している.
資料: マイクロパターンを利用したステップモータの研究
XYθZサーフェスエンコーダ内蔵平面ステージ

サーフェスエンコーダは光学式2次元角度センサ,角度格子から構成される装置で,3自由度XYθZの測定が可能である.
単体での分解能はX,Yにおいて20nm,θZで 0.2秒である.これを平面ステージに組み込んだシステムでは200nm,1秒の分解能を達成している.
資料: サーフェスモータ駆動XYθZ3自由度サーフェスエンコーダ内蔵平面ステージ
資料: XYθZ3自由度平面ステージコントローラの開発
Sawyer型平面モータの精密位置決めに関する研究
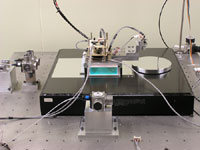
Sawyer型平面モータはサーフェスモータの中で高加速度,超ストロークという特徴を有する.
当研究室で提案している多自由度位置決め機構サーフェスエンコーダを搭載するためにフィルム型の2次元角度格子を用いていた.
サーフェスエンコーダによるクローズドループ制御により サブミクロンの位置決め分解能を持つことが確認された.
資料: Sawyer型平面モータの精密位置決めに関する研究